A new scientific theory, which proposes a new Celestial Mechanics, points out that we can understand the behavior of bodies subjected to successive accelerations by rotations, by means of field theory. Since the velocity fields determine the behavior of the body.
The new scientific theory was presented by the main researcher, Gabriel Barceló, during the World Physics Summit, organized by Scientific Federation, which took place in Madrid on September 27 and 28, simultaneously with the World Congress On Quantum And Nuclear Engineering.
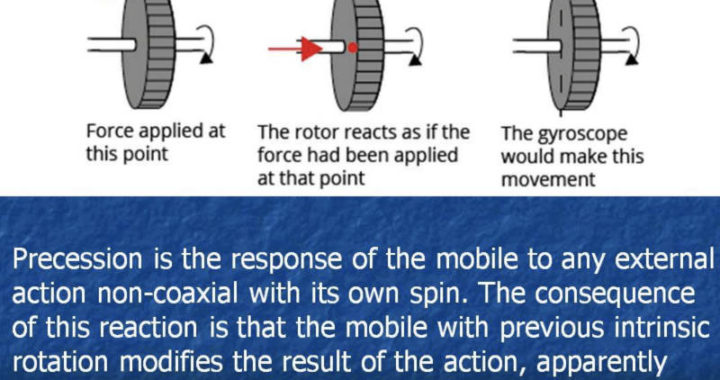
Barceló explained that precession is the response of the mobile to any external action, not coaxial with its own spin. The consequence of this reaction is that the mobile with previous intrinsic rotation modifies the result of the action, apparently displacing the point of application of the force by 90°, in direction of rotation of the object.
In this way, the second rotation generated in a rigid solid body does not respond to the laws of Classical Mechanics, nor to vector algebra: after a half turn, the second rotation started on an axis perpendicular to the torque that generated it, and not on the axis of the acting pair of forces.
This Theory proposed by Barceló, deduces a general equation of motion for bodies endowed with angular momentum, when subjected to successive non-coaxial pairs, which we call the «general equation of motion of non-inertial systems with axial symmetry».
In this hypothesis, the equation of motion will be determined by the translation velocity of the center of mass of the body, the magnitude of which has not varied and, therefore, will be equal to that of the initial velocity of translation of the body subject to the spatial rotation.
New Celestial Mechanics
From this premises, its author develops a new Celestial Mechanics: This Theory conceives a universe with its elements in rotation, and in constant equilibrium, in which, a moment or a pair of forces will generate, while acting, a permanent orbiting movement, in a closed and flat trajectory.
In this cosmos, each celestial body maintains its initial intrinsic rotation constant, thus generating a universe with its elements in constant orbit and in stable dynamic equilibrium, in harmony and not in unlimited expansion.
It is a new conception of celestial mechanics based on dynamic non-inertial hypothesis for bodies accelerated by rotations, which proposes a law of simultaneity of orbit and rotation.
From this conception emerges a cosmos in constant and enduring dynamic equilibrium. This is the balance that the human being has perceived when observing the celestial dome for millennia.
The new scientific theory can also review the understanding of the nature of the atomic structure, since the dynamic reactions analyzed can affect the variation of the energetic levels of the electron and, more particularly, the very concept of spin.
This theory can also influence the concept of quantization of Planck radiation, and its constant, since it supposes to be related to the notion of spin. It even proposes that this minimum value of the physical quantities can be justified by the value of the angular momentum of the atomic particles.
Through this model of dynamic interactions, one could even justify how a body in rotation can initiate an elliptical, circular or even helical trajectory, without the existence of a true central force. According to this dynamic model, the application of a pair of forces to a body with intrinsic rotation, generates a stable system, and in constant dynamic equilibrium.
The theory proposed by this research is fully consistent with the Einstein´s theory of general relativity, and with Kepler’s laws, but it allows to justify other characteristics of the behavior of the celestial bodies, not foreseen in the other two models, such as the Dynamic equilibrium of the universe, the plane celestial systems or the rings of Saturn.
To sum up, this proposal complements the theory of general relativity, and confirms that the Newtonian model was at the time a useful, but conceptually erroneous calculation tool for non-inertial systems.